Demo
This is a short demonstration on setting up Y-cyc-ESC to run a motor. The sample motor is an outer rotor high speed BLDC drone motor.
1 Connections
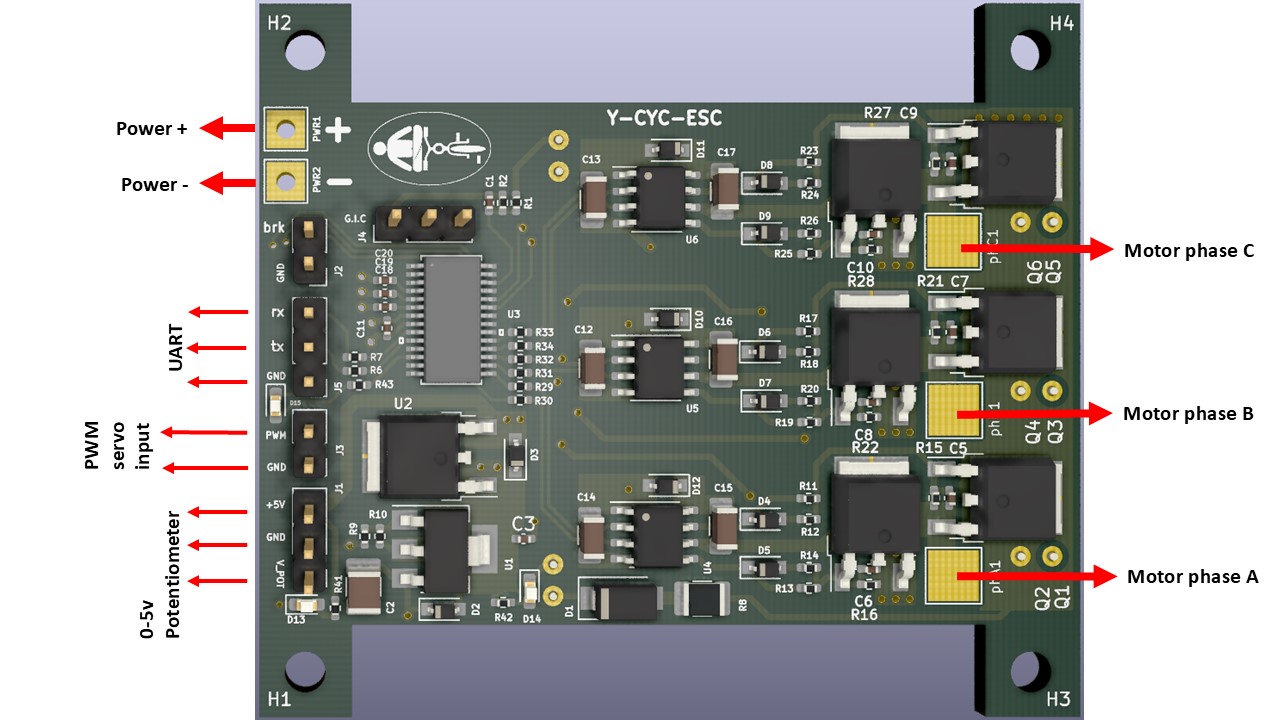
Make the Connections as shows in the figure with the power supply off.
 |
|---|
| Make the Connections as shown. Ensure the power supply is off before making the connections. |
- For this demonstration, a PWM input (1000us-2000us pulse width) is used.
- Turn on the power supply. Connect the USB-to-SERIAL cable from Y-cyc-ESC to the PC. Any USB-to-SERIAL interface with appropriate drivers can be used. This demonstration uses a FTDI based UBS-to-SERIAL.
- Click connect. The GUI will detect the Y-cyc-ESC and display the COM port to which Y-cyc-ESC is connected.
 |
|---|
| Click the Connect button so the GUI can establish connection to the board |
2 Get motor parameters
Y-cyc-ESC implements a system identification routine to estimate the motor parameters quickly. If the motor parameters are readily available, you can enter them and skip the system identification.
 |
|---|
| Click on “System ID” to measure motor parameters. The motor parameters can also be directly entered if they are known |
3 Gain tuning
The gains are set for a high speed outer-rotor BLDC drone motor. For more information on gain tuning, refer to the user-guide.
 |
|---|
| Only 3 inputs are needed to completely tune the motor control system |
4 Application settings
For a drone motor Application, the motor will be starting in V/F mode and will operate in Vq control mode. Refer to user-guide for more information on configuring startup-modes and control-modes.
A 1000us-2000us PWM input will control the motor speed.
 |
|---|
| Configure the Application settings for a high speed drone motor |
5 Update drive
After all the parameters are set, click on “Load parameters to drive” to update the drive. For future use, the parameters can be saved by clicking the “save to file” button.
After the drive is updated, click on “Reset and start”. The drive is now ready to run the motor.
 |
|---|
| Load the parameters to the drive. Reset the controller so it is ready to run the motor |
6 Run the motor
Use the PWM input to vary the motor speed and verify the motor runs as expected.
 |
|---|
| PWM input varies the motor speed by regulating the voltage Vq |